/*
* FileName : MatObj.cpp
* Author : xiahouzuoxin @163.com
* Version : v1.0
* Date : Thu 15 May 2014 09:12:45 PM CST
* Brief :
*
* Copyright (C) MICL,USTB
*/
#include <cv.h>
#include <highgui.h>
#include <iostream>
using namespace std;
using namespace cv;
int main(void)
{
/*
* Create Mat
*/
Mat M(2,2,CV_8UC3, Scalar(0,0,255));
cout << "M=" << endl << " " << M << endl << endl;
/*
* Matlab style
*/
Mat E = Mat::eye(4,4,CV_64F);
cout << "E=" << endl << " " << E << endl << endl;
E = Mat::ones(4,4,CV_64F);
cout << "E=" << endl << " " << E << endl << endl;
E = Mat::zeros(4,4,CV_64F);
cout << "E=" << endl << " " << E << endl << endl;
/*
* Convert IplImage to Mat
*/
IplImage *img = cvLoadImage("../test_imgs/Lena.jpg");
Mat L(img);
namedWindow("Lena.jpg", CV_WINDOW_AUTOSIZE);
imshow("Lena.jpg", L);
waitKey(0);
/*
* Init Mat with separated data
*/
Mat C = (Mat_<int>(3,3) << 0,1,2,3,4,5,6,7,8);
cout << "C=" << endl << " " << C << endl << endl;
return 0;
}-
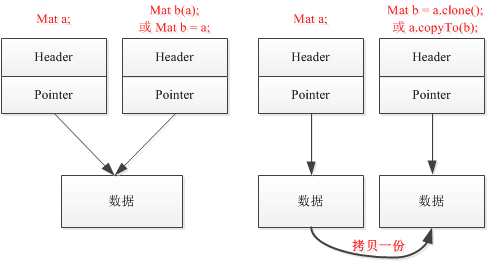
Mat是OpenCV最基本的数据结构,Mat即矩阵(Matrix)的缩写,Mat数据结构主要包含2部分:Header和Pointer。Header中主要包含矩阵的大小,存储方式,存储地址等信息;Pointer中存储指向像素值的指针。我们在读取图片的时候就是将图片定义为Mat类型,其重载的构造函数一大堆,
class CV_EXPORTS Mat { public: //! default constructor Mat(); //! constructs 2D matrix of the specified size and type // (_type is CV_8UC1, CV_64FC3, CV_32SC(12) etc.) Mat(int _rows, int _cols, int _type); Mat(Size _size, int _type); //! constucts 2D matrix and fills it with the specified value _s. Mat(int _rows, int _cols, int _type, const Scalar& _s); Mat(Size _size, int _type, const Scalar& _s); //! constructs n-dimensional matrix Mat(int _ndims, const int* _sizes, int _type); Mat(int _ndims, const int* _sizes, int _type, const Scalar& _s); //! copy constructor Mat(const Mat& m); //! constructor for matrix headers pointing to user-allocated data Mat(int _rows, int _cols, int _type, void* _data, size_t _step=AUTO_STEP); Mat(Size _size, int _type, void* _data, size_t _step=AUTO_STEP); Mat(int _ndims, const int* _sizes, int _type, void* _data, const size_t* _steps=0); //! creates a matrix header for a part of the bigger matrix Mat(const Mat& m, const Range& rowRange, const Range& colRange=Range::all()); Mat(const Mat& m, const Rect& roi); Mat(const Mat& m, const Range* ranges); //! converts old-style CvMat to the new matrix; the data is not copied by default Mat(const CvMat* m, bool copyData=false); //! converts old-style CvMatND to the new matrix; the data is not copied by default Mat(const CvMatND* m, bool copyData=false); //! converts old-style IplImage to the new matrix; the data is not copied by default Mat(const IplImage* img, bool copyData=false); ...... }要了解如何初始化Mat结构,就应该了解它的构造函数,比如程序中的第一初始化方式调用额就是
Mat(int _rows, int _cols, int _type, const Scalar& _s);这个构造函数。
IplImage*是C语言操作OpenCV的数据结构,在当时C操纵OpenCV的时候,地位等同于Mat,OpenCV为其提供了一个接口,很方便的直接将IplImage转化为Mat,即使用构造函数
Mat(const IplImage* img, bool copyData=false);上面程序中的第二种方法就是使用的这个构造函数。
-
关于Mat数据复制:前面说过Mat包括头和数据指针,当使用Mat的构造函数初始化的时候,会将头和数据指针复制(注意:只是指针复制,指针指向的地址不会复制),若要将数据也复制,则必须使用copyTo或clone函数
-
Mat还有几个常用的成员函数,在之后的文章中将会使用到:
//! returns true iff the matrix data is continuous // (i.e. when there are no gaps between successive rows). // similar to CV_IS_MAT_CONT(cvmat->type) bool isContinuous() const;这了解上面的函数作用前,得了解下OpenCV中存储像素的方法,如下,灰度图(单通道)存储按行列存储,
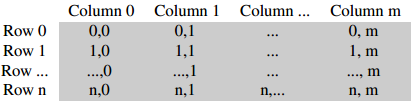
三通道RGB存储方式如下,每列含有三个通道,

为了加快访问的速度,openCV往往会在内存中将像素数据连续地存储成一行,isContinus()函数的作用就是用于判断是否连续存储成一行。存储成一行有什么好处呢?给定这行的头指针p,则只要使用p++操作就能逐个访问数据。
因此当判断存放在一行的时候,可以通过数据指针++很容易遍历图像像素:
long nRows = M.rows * M.channels(); // channels()也是Mat中一个常用的函数,用于获取通道数(RGB=3,灰度=1) long nCols = M.cols; uchar *p = M.data; // 数据指针 if(M.isContinuous()) { nCols *= nRows; for (long i=0; i < nCols; i++) { *p++ = ...; // 像素赋值或读取操作 } }请注意以上几个常用的Mat成员遍历和函数:
M.row; // 返回图像行数 M.nCols; // 返回图像列数 M.channels(); //返回通道数 M.isContinuous(); // 返回bool类型表示是否连续存储 -
更多关于Mat的信息请参考安装目录下的include/opencv2/core.hpp文件




左边是矩阵的一些操作输出结果,右边的图是通过IplImage *结构读入,转换为Mat后显示结果。