Warning
You're reading the documentation for a version of ROS 2 that has reached its EOL (end-of-life), and is no longer officially supported.
If you want up-to-date information, please have a look at Jazzy.
Adding a frame (Python)
Goal: Learn how to to add an extra frame to tf2.
Tutorial level: Intermediate
Time: 15 minutes
Background
In previous tutorials, we recreated the turtle demo by writing a tf2 broadcaster and a tf2 listener. This tutorial will teach you how to add extra fixed and dynamic frames to the transformation tree. In fact, adding a frame in tf2 is very similar to creating the tf2 broadcaster, but this example will show you some additional features of tf2.
For many tasks related to transformations, it is easier to think inside a local frame. For example, it is easiest to reason about laser scan measurements in a frame at the center of the laser scanner. tf2 allows you to define a local frame for each sensor, link, or joint in your system. When transforming from one frame to another, tf2 will take care of all the hidden intermediate frame transformations that are introduced.
tf2 tree
tf2 builds up a tree structure of frames and, thus, does not allow a closed loop in the frame structure.
This means that a frame only has one single parent, but it can have multiple children.
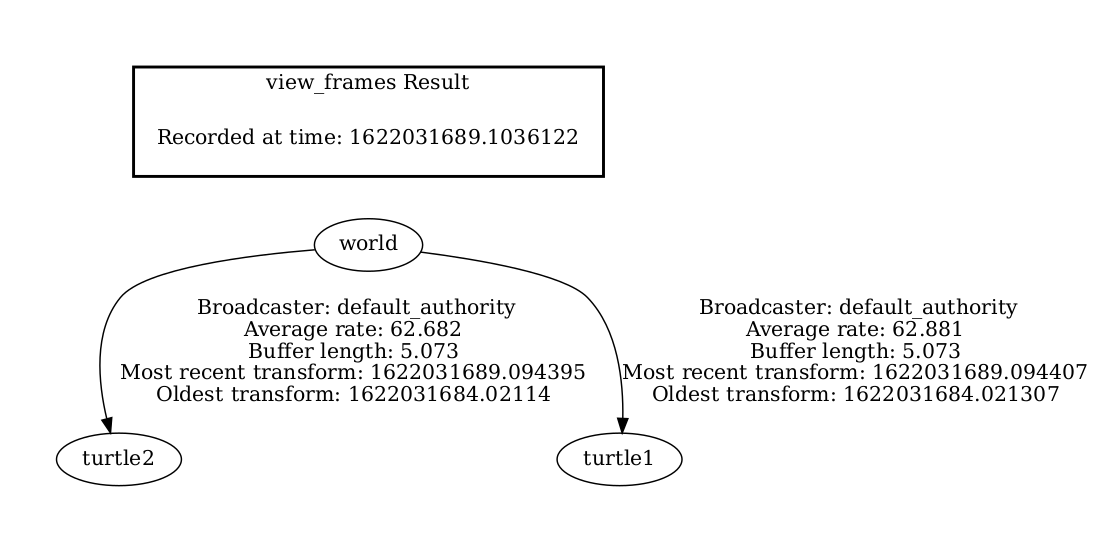
Currently, our tf2 tree contains three frames: world, turtle1 and turtle2.
The two turtle frames are children of the world frame.
If we want to add a new frame to tf2, one of the three existing frames needs to be the parent frame, and the new one will become its child frame.
Tasks
1 Write the fixed frame broadcaster
In our turtle example, we’ll add a new frame carrot1, which will be the child of the turtle1.
This frame will serve as the goal for the second turtle.
Let’s first create the source files.
Go to the learning_tf2_py package we created in the previous tutorials.
Inside the src/learning_tf2_py/learning_tf2_py directory download the fixed frame broadcaster code by entering the following command:
wget https://raw.githubusercontent.com/ros/geometry_tutorials/ros2/turtle_tf2_py/turtle_tf2_py/fixed_frame_tf2_broadcaster.py
wget https://raw.githubusercontent.com/ros/geometry_tutorials/ros2/turtle_tf2_py/turtle_tf2_py/fixed_frame_tf2_broadcaster.py
In a Windows command line prompt:
curl -sk https://raw.githubusercontent.com/ros/geometry_tutorials/ros2/turtle_tf2_py/turtle_tf2_py/fixed_frame_tf2_broadcaster.py -o fixed_frame_tf2_broadcaster.py
Or in powershell:
curl https://raw.githubusercontent.com/ros/geometry_tutorials/ros2/turtle_tf2_py/turtle_tf2_py/fixed_frame_tf2_broadcaster.py -o fixed_frame_tf2_broadcaster.py
Now open the file called fixed_frame_tf2_broadcaster.py.
from geometry_msgs.msg import TransformStamped
import rclpy
from rclpy.node import Node
from tf2_ros import TransformBroadcaster
class FixedFrameBroadcaster(Node):
def __init__(self):
super().__init__('fixed_frame_tf2_broadcaster')
self.tf_broadcaster = TransformBroadcaster(self)
self.timer = self.create_timer(0.1, self.broadcast_timer_callback)
def broadcast_timer_callback(self):
t = TransformStamped()
t.header.stamp = self.get_clock().now().to_msg()
t.header.frame_id = 'turtle1'
t.child_frame_id = 'carrot1'
t.transform.translation.x = 0.0
t.transform.translation.y = 2.0
t.transform.translation.z = 0.0
t.transform.rotation.x = 0.0
t.transform.rotation.y = 0.0
t.transform.rotation.z = 0.0
t.transform.rotation.w = 1.0
self.tf_broadcaster.sendTransform(t)
def main():
rclpy.init()
node = FixedFrameBroadcaster()
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
rclpy.shutdown()
The code is very similar to the tf2 broadcaster tutorial example and the only difference is that the transform here does not change over time.
1.1 Examine the code
Let’s take a look at the key lines in this piece of code.
Here we create a new transform, from the parent turtle1 to the new child carrot1.
The carrot1 frame is 2 meters offset in y axis in terms of the turtle1 frame.
t = TransformStamped()
t.header.stamp = self.get_clock().now().to_msg()
t.header.frame_id = 'turtle1'
t.child_frame_id = 'carrot1'
t.transform.translation.x = 0.0
t.transform.translation.y = 2.0
t.transform.translation.z = 0.0
1.2 Add an entry point
To allow the ros2 run command to run your node, you must add the entry point to setup.py (located in the src/learning_tf2_py directory).
Add the following line between the 'console_scripts': brackets:
'fixed_frame_tf2_broadcaster = learning_tf2_py.fixed_frame_tf2_broadcaster:main',
1.3 Write the launch file
Now let’s create a launch file for this example.
With your text editor, create a new file called turtle_tf2_fixed_frame_demo_launch.py in the src/learning_tf2_py/launch directory, and add the following lines:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch_ros.actions import Node
def generate_launch_description():
demo_nodes = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('learning_tf2_py'), 'launch'),
'/turtle_tf2_demo_launch.py']),
)
return LaunchDescription([
demo_nodes,
Node(
package='learning_tf2_py',
executable='fixed_frame_tf2_broadcaster',
name='fixed_broadcaster',
),
])
This launch file imports the required packages and then creates a demo_nodes variable that will store nodes that we created in the previous tutorial’s launch file.
The last part of the code will add our fixed carrot1 frame to the turtlesim world using our fixed_frame_tf2_broadcaster node.
Node(
package='learning_tf2_py',
executable='fixed_frame_tf2_broadcaster',
name='fixed_broadcaster',
),
1.4 Build
Run rosdep in the root of your workspace to check for missing dependencies.
rosdep install -i --from-path src --rosdistro iron -y
rosdep only runs on Linux, so you will need to install geometry_msgs and turtlesim dependencies yourself
rosdep only runs on Linux, so you will need to install geometry_msgs and turtlesim dependencies yourself
Still in the root of your workspace, build your package:
colcon build --packages-select learning_tf2_py
colcon build --packages-select learning_tf2_py
colcon build --merge-install --packages-select learning_tf2_py
Open a new terminal, navigate to the root of your workspace, and source the setup files:
. install/setup.bash
. install/setup.bash
# CMD
call install\setup.bat
# Powershell
.\install\setup.ps1
1.5 Run
Now you can start the turtle broadcaster demo:
ros2 launch learning_tf2_py turtle_tf2_fixed_frame_demo_launch.py
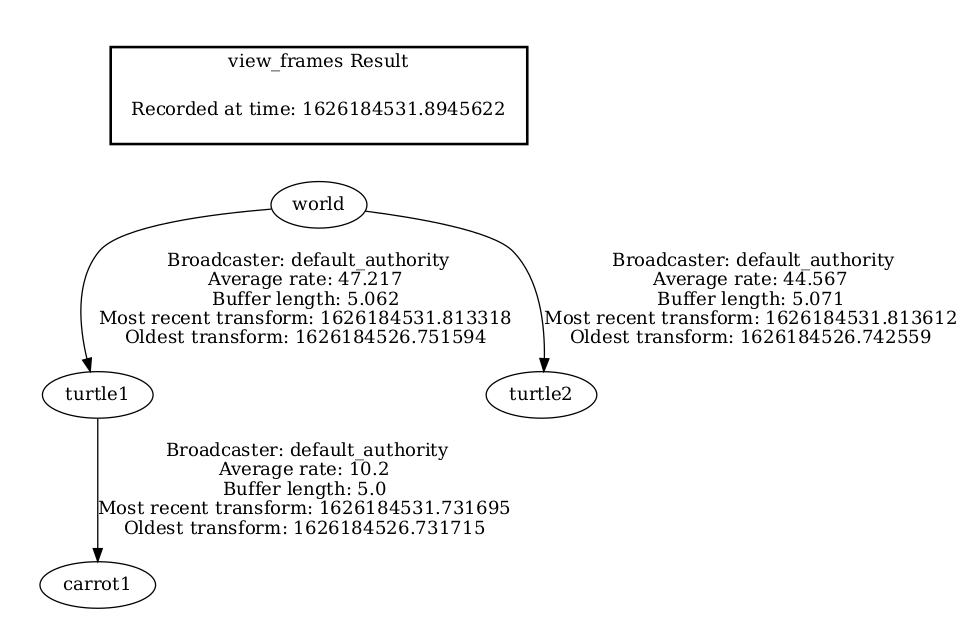
You should notice that the new carrot1 frame appeared in the transformation tree.
If you drive the first turtle around, you should notice that the behavior didn’t change from the previous tutorial, even though we added a new frame. That’s because adding an extra frame does not affect the other frames and our listener is still using the previously defined frames.
Therefore if we want our second turtle to follow the carrot instead of the first turtle, we need to change value of the target_frame.
This can be done two ways.
One way is to pass the target_frame argument to the launch file directly from the console:
ros2 launch learning_tf2_py turtle_tf2_fixed_frame_demo_launch.py target_frame:=carrot1
The second way is to update the launch file.
To do so, open the turtle_tf2_fixed_frame_demo_launch.py file, and add the 'target_frame': 'carrot1' parameter via launch_arguments argument.
def generate_launch_description():
demo_nodes = IncludeLaunchDescription(
...,
launch_arguments={'target_frame': 'carrot1'}.items(),
)
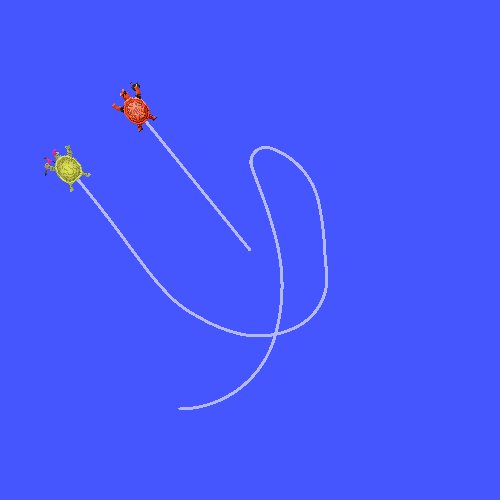
Now rebuild the package, restart the turtle_tf2_fixed_frame_demo_launch.py, and you’ll see the second turtle following the carrot instead of the first turtle!
2 Write the dynamic frame broadcaster
The extra frame we published in this tutorial is a fixed frame that doesn’t change over time in relation to the parent frame.
However, if you want to publish a moving frame you can code the broadcaster to change the frame over time.
Let’s change our carrot1 frame so that it changes relative to turtle1 frame over time.
Go to the learning_tf2_py package we created in the previous tutorial.
Inside the src/learning_tf2_py/learning_tf2_py directory download the dynamic frame broadcaster code by entering the following command:
wget https://raw.githubusercontent.com/ros/geometry_tutorials/ros2/turtle_tf2_py/turtle_tf2_py/dynamic_frame_tf2_broadcaster.py
wget https://raw.githubusercontent.com/ros/geometry_tutorials/ros2/turtle_tf2_py/turtle_tf2_py/dynamic_frame_tf2_broadcaster.py
In a Windows command line prompt:
curl -sk https://raw.githubusercontent.com/ros/geometry_tutorials/ros2/turtle_tf2_py/turtle_tf2_py/dynamic_frame_tf2_broadcaster.py -o dynamic_frame_tf2_broadcaster.py
Or in powershell:
curl https://raw.githubusercontent.com/ros/geometry_tutorials/ros2/turtle_tf2_py/turtle_tf2_py/dynamic_frame_tf2_broadcaster.py -o dynamic_frame_tf2_broadcaster.py
Now open the file called dynamic_frame_tf2_broadcaster.py:
import math
from geometry_msgs.msg import TransformStamped
import rclpy
from rclpy.node import Node
from tf2_ros import TransformBroadcaster
class DynamicFrameBroadcaster(Node):
def __init__(self):
super().__init__('dynamic_frame_tf2_broadcaster')
self.tf_broadcaster = TransformBroadcaster(self)
self.timer = self.create_timer(0.1, self.broadcast_timer_callback)
def broadcast_timer_callback(self):
seconds, _ = self.get_clock().now().seconds_nanoseconds()
x = seconds * math.pi
t = TransformStamped()
t.header.stamp = self.get_clock().now().to_msg()
t.header.frame_id = 'turtle1'
t.child_frame_id = 'carrot1'
t.transform.translation.x = 10 * math.sin(x)
t.transform.translation.y = 10 * math.cos(x)
t.transform.translation.z = 0.0
t.transform.rotation.x = 0.0
t.transform.rotation.y = 0.0
t.transform.rotation.z = 0.0
t.transform.rotation.w = 1.0
self.tf_broadcaster.sendTransform(t)
def main():
rclpy.init()
node = DynamicFrameBroadcaster()
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
rclpy.shutdown()
2.1 Examine the code
Instead of a fixed definition of our x and y offsets, we are using the sin() and cos() functions on the current time so that the offset of carrot1 is constantly changing.
seconds, _ = self.get_clock().now().seconds_nanoseconds()
x = seconds * math.pi
...
t.transform.translation.x = 10 * math.sin(x)
t.transform.translation.y = 10 * math.cos(x)
2.2 Add an entry point
To allow the ros2 run command to run your node, you must add the entry point to setup.py (located in the src/learning_tf2_py directory).
Add the following line between the 'console_scripts': brackets:
'dynamic_frame_tf2_broadcaster = learning_tf2_py.dynamic_frame_tf2_broadcaster:main',
2.3 Write the launch file
To test this code, create a new launch file turtle_tf2_dynamic_frame_demo_launch.py in the src/learning_tf2_py/launch directory and paste the following code:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch_ros.actions import Node
def generate_launch_description():
demo_nodes = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('learning_tf2_py'), 'launch'),
'/turtle_tf2_demo_launch.py']),
launch_arguments={'target_frame': 'carrot1'}.items(),
)
return LaunchDescription([
demo_nodes,
Node(
package='learning_tf2_py',
executable='dynamic_frame_tf2_broadcaster',
name='dynamic_broadcaster',
),
])
2.4 Build
Run rosdep in the root of your workspace to check for missing dependencies.
rosdep install -i --from-path src --rosdistro iron -y
rosdep only runs on Linux, so you will need to install geometry_msgs and turtlesim dependencies yourself
rosdep only runs on Linux, so you will need to install geometry_msgs and turtlesim dependencies yourself
Still in the root of your workspace, build your package:
colcon build --packages-select learning_tf2_py
colcon build --packages-select learning_tf2_py
colcon build --merge-install --packages-select learning_tf2_py
Open a new terminal, navigate to the root of your workspace, and source the setup files:
. install/setup.bash
. install/setup.bash
# CMD
call install\setup.bat
# Powershell
.\install\setup.ps1
1.5 Run
Now you can start the dynamic frame demo:
ros2 launch learning_tf2_py turtle_tf2_dynamic_frame_demo_launch.py
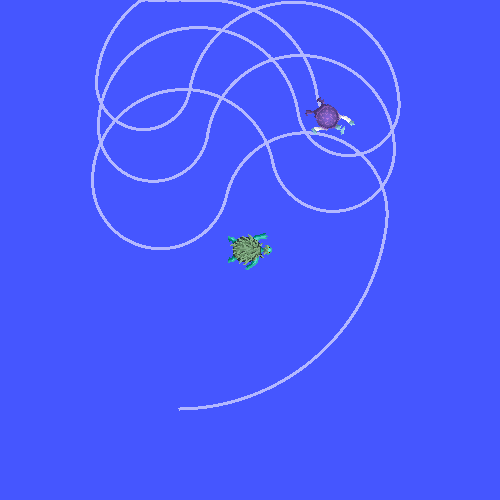
You should see that the second turtle is following the carrot’s position that is constantly changing.
Summary
In this tutorial, you learned about the tf2 transformation tree, its structure, and its features. You also learned that it is easiest to think inside a local frame, and learned to add extra fixed and dynamic frames for that local frame.