This repository offers an assortment of high-quality models for dexterous hands and objects. Both of them are in URDF format.
| Robot Model | Visual1 | Collision2 |
|---|---|---|
| Allegro Hand |  |
 |
| Shadow Hand |  |
 |
| SCHUNK SVH Hand |  |
 |
| Ability Hand |  |
 |
| Leap Hand |  |
 |
| DClaw Gripper |  |
 |
| Barrett Hand |  |
 |
URDF Parser Links: yourdfpy, IsaacGym, SAPIEN, PyBullet
| Robot Model | Official Website | URDF Source | CAD Model Source | License |
|---|---|---|---|---|
| Allegro Hand | Wonik Robotics | allegro_hand_ros | N/A | BSD |
| Shadow Hand | Shadow Robot Company | sr_common | N/A | GPL-3.0 |
| SCHUNK SVH Hand | SCHUNK | schunk_svh_ros_driver | N/A | Apache-2.0 |
| Ability Hand | PSYONIC | ability-hand-api | N/A | N/A |
| Leap Hand | Leap Hand | LEAP_Hand_Sim | Leap Hand CAD | CC BY-NC 4.0 |
| DClaw Gripper | Robel Benchmark | N/A | D'Claw CAD | Apache-2.0 |
| Barrett Hand | Barrett Technology | bhand_model | BarrettHand CAD | BSD |
| DexHand | DexHand | dexhand_description | Dexhand | CC BY-NC-SA 4.0 |
Footnotes
-
Ray tracing animation are rendered in
SAPIENusing the urdf withglbversion. Code can be found in generate_urdf_animation_sapien.py. ↩ -
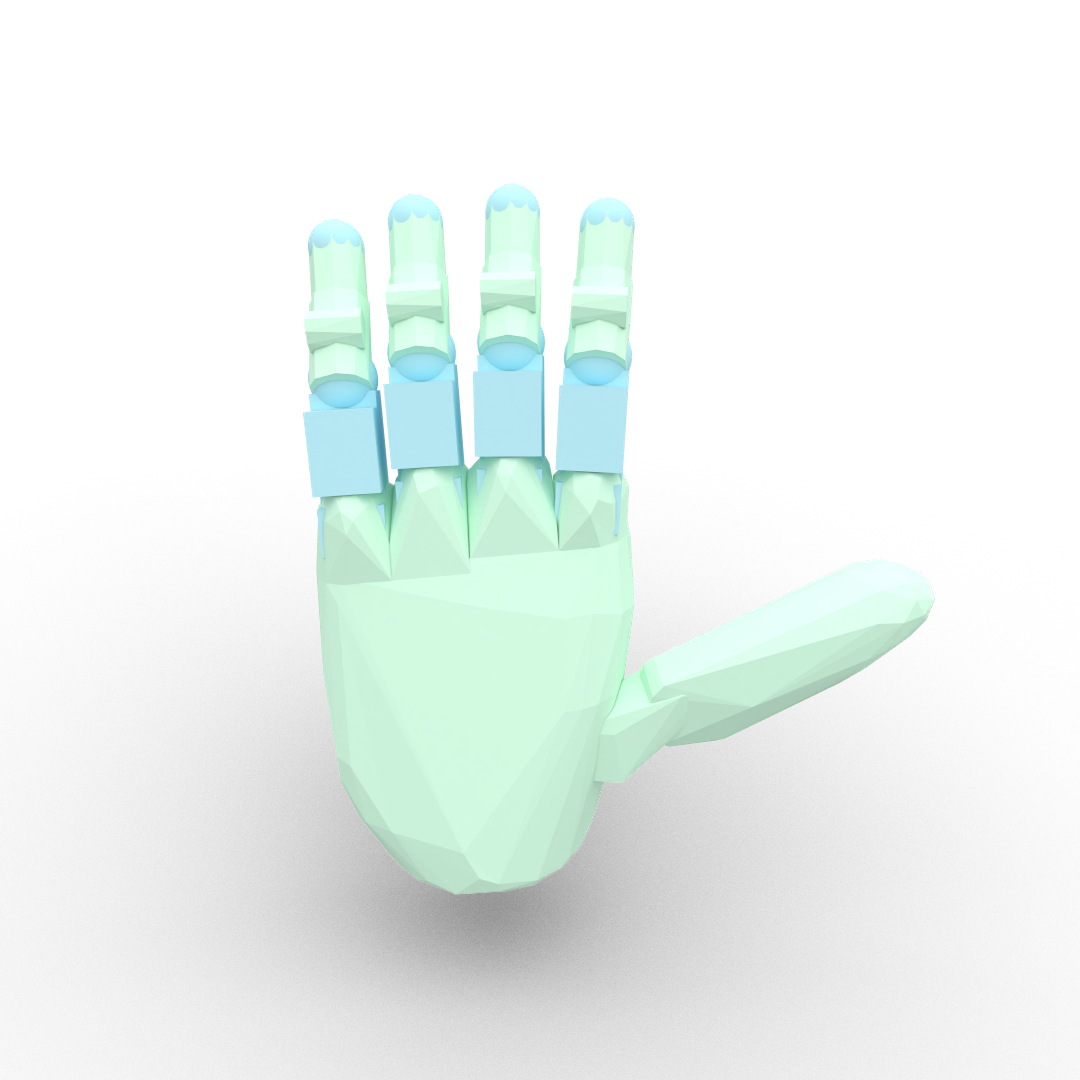
Collision mesh are rendered in
SAPIENusing the same urdf as the visual. Blue links are modeled using primitives while green links are modeled using convex triangle meshes. Code can be found in generate_urdf_collision_figure_sapien.py](tools/generate_urdf_collision_figure_sapien.py). ↩